









The Lagadic group no longer exists. From January 1st, 2018, most of the Lagadic people are now in the Rainbow group.
Lagadic
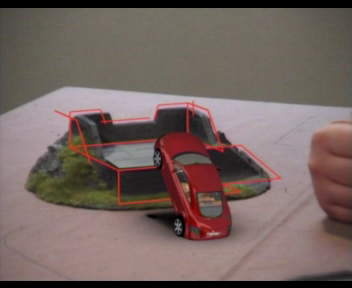
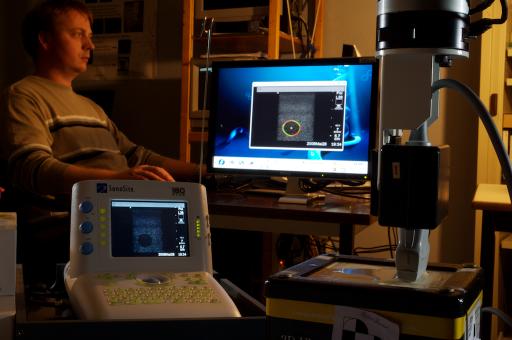
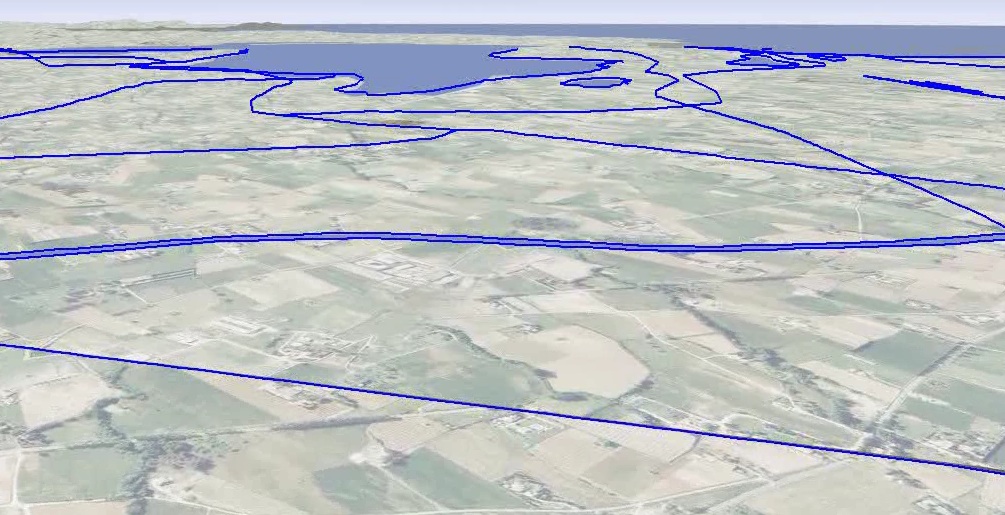
Asservissement visuel en robotique, vision et animationLagadic est une équipe de recherche Inria bilocalisée dans les centres de recherche Inria de Rennes Bretagne Atlantique et Sophia-Antipolis Méditerranée. La composante rennaise de Lagadic est également une équipe de l'UMR Irisa. Ses axes de recherche portent sur la vision robotique : asservissement visuel, suivi temps réel au sein de séquences d'images, SLAM. Plus généralement, notre objectif est d'élaborer des stratégies de perception et d'action à partir d'images pour des applications en robotique (localisation, navigation, manipulation, robotique médicale) et réalité augmentée. Pour valider ses recherches, l'équipe exploite des plateformes expérimentales de robotique. Elle diffuse et maintient également depuis de nombreuses années ViSP, un logiciel libre sous licence GPLv2. |
|
Axes de Recherche
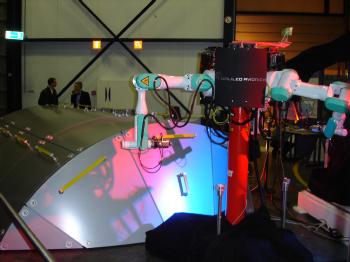
Asservissement visuel
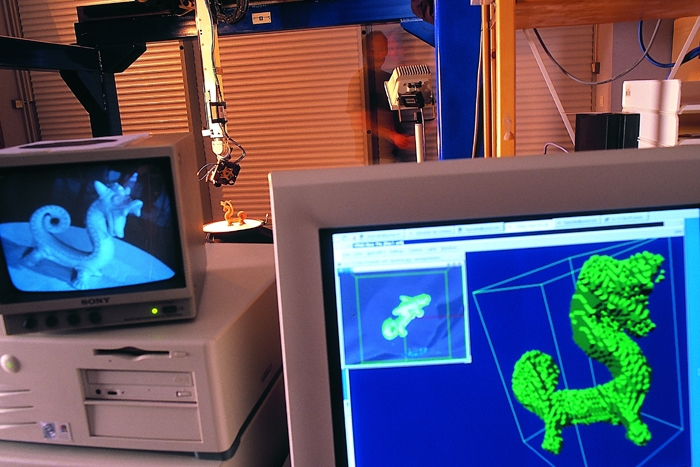
Traitement d'images, localisation 3D

|
ApplicationsRobotique
Animation
Réalité augmentée
|
Collaborations récentes
Actions industiellesFinancements de thèsesContrats de recherche |
Actions nationalesInvestissements d'avenirProjets ANR |
Projets FUIDGAOSEO |
Actions internationalesProjets EuropéensCollaborations |
Responsable Scientifique
François Chaumette
+33 2 99 84 72 55
Francois.Chaumette@irisa.fr
Secrétariat : +33 2 99 84 22 52 (Hélène de la Ruée)