[an error occurred while processing this directive]
Claire Dune
| Coordonnées
| Cursus
| Recherches
| Publications
| Partenariats
| Enseignements
|
Coordonnées
Email : Claire.Dune@irisa.fr
Adresse : IRISA / INRIA Rennes
Campus Universitaire de Beaulieu
35042 Rennes cedex - France
Tél : +33 2 99 84 74 32
Fax : +33 2 99 84 71 71
Secrétaire : +33 2 99 84 22 52
(Céline Ammoniaux)
|

|
Cursus
En 2005, j'ai obtenu le diplôme de l' Ecole Nationale Supérieure de Physique de Strasbourg, option Ingénierie des Systèmes Automatique et Vision, ainsi que le Diplôme d'Études Approfondies Photonique Imagerie et Cybernétique, option Automatique et Vision, de l'Université Louis Pasteur de Strasbourg.
Depuis novembre 2005, je prépare une thèse intitulée "Saisie automatique d'objets à partir d'information vidéo par un robot
manipulateur pour l'assistance aux personnes handicapées" dans l'équipe
Lagadic de l'I.R.I.S.A. sous la direction d'Eric Marchand. Ma thèse s'effectue en partenariat avec le Laboratoire d'Intégration des Systèmes et des Technologies (L.I.S.T) du C.E.A. de Fontenay-aux-Roses.
Thématiques de recherche
Domaines de recherche
- Robotique ;
- Asservissements visuels ;
- Géométrie multi-vues ;
- Saisie et manipulation d'objets.
Sujet : Saisie automatique d'objets à partir d'information vidéo par un robot
manipulateur pour l'assistance aux personnes handicapées
|
L'objectif de ce projet est de permettre à une personne handicapée de déclencher la saisie d'un objet en un "seul clic" sur une image vidéo.
Le système robotique est un bras manipulateur équipé d'une pince et d'un système de vision coopératif caméra embarquée/caméra déportée. Une des caméras est montée sur un support extérieur à la scène (caméra déportée) et l'autre est fixée à l'organe effecteur du bras (caméra embarquée). La caméra déportée offre une vue d'ensemble de la scène tandis que la caméra embarquée permet d'en visualiser des détails. Dans un premier temps, les méthodes développées sont testée sur le robot cartésien (Afma 6) de l'équipe Lagadic. Elles seront ensuite évaluées sur le robot du C.E.A./ L.I.S.T.: un bras Manus ARM monté sur un fauteuil roulant et commandé par un système de vision.
|

|
Positionnement automatique des caméras par coopération caméra embarquée/caméra déportée
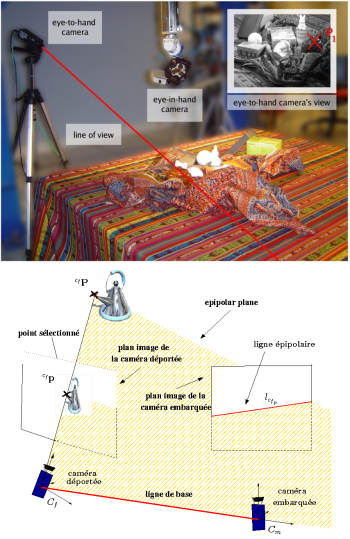 |
La plupart des systèmes de saisie guidés par la vision supposent que l'objet d'intérêt se situe dans le champ de vision des caméras avant le déclenchement de la saisie. Si cette hypothèse n'est pas vérifiée, un opérateur déplace manuellement les caméras avant de déclencher la saisie. Cette étape, qui intervient avant la phase de saisie à proprement parler, peut se révéler très coûteuse si l'utilisateur du système est une personne à mobilité réduite.
Nous proposons une méthode de positionnement des caméras qui réduit l'action de l'opérateur à "un clic". Le système étudié est constitué d'une bras manipulateur commandé par un système de vision hybride caméra embarquée / caméra déportée. Le système est entièrement calibré, ie. les paramètres extrinsèques et intrinsèques de caméras sont connus. Avant le déclenchement de la phase de saisie, le bras est dans une position quelconque. L'objet à saisir est dans le champ de vision de la caméra déportée mais il n'est pas nécessairement vu par la caméra embarquée. L'approche se veut générique : la scène est composée de plusieurs objets tirés du quotidien et aucune hypothèse n'est faite sur la qualité de l'arrière plan. On ne dispose pas d'a priori sur l'objet à saisir ni de base de données de modèles ou d'apparences.
L'approche repose sur un asservissement visuel basé sur la géométrie épipolaire. L'opérateur désigne un point dans l'image de la caméra déportée. L'objet se projette au voisinage de ce point dans le plan image de la caméra déportée. La contrainte épipolaire impose que l'objet se projette au voisinage d'une ligne dans le plan image de la caméra embarquée. Dans un premier temps cette ligne est centrée dans l'image de la caméra embarquée par asservissement visuel. La caméra embarquée balaye ensuite cette ligne en la maintenant centrée dans l'image. L'objet à saisir est repéré par une mise en correspondance classique de points d'intérêts entre le voisinage du point sélectionné dans l'image de la caméra déportée et le voisinage de la ligne épipolaire correspondante dans l'image de la caméra embarquée. on utilise ensuite un cadre bayésien pour fusionner les informations obtenues lors du parcours de la ligne de vue.
La méthode de positionnement des caméras a été testée et validée sur un bras manipulateur commandé par un système de vision (cf. publication ICRA'07 ).
|
Partenariats
Cette Thèse se déroule au sein de l'équipe Lagadic de l'I.R.I.S.A./I.N.R.I.A. Rennes. Elle est cofinancée par la Région Bretagne et le C.E.A..
L'application d'aide à la saisie est développée en concertation avec les équipes de l'Association pour la Promotion des Plates-formes RObotiques Concernant les personnes HandicapEes (A.P.P.R.O.C.H.E.) : le centre de réeducation de Kerpape, le C.H.U. de Brest, le centre héliomarin de Pen Bron, l'Association Francaise contre les Myopathies (A.F.M), entre autres.

Publications
Liste complète (et fichiers postcript ou pdf si disponibles)
Enseignements
- 20h -- cycle ingénieur 1e année INSA Rennes -- TP Structures de données (Java)
- 10h -- cycle ingénieur 2e année IFSIC -- TP Introduction au traitement d'images (C++)
- 8h -- cycle ingénieur 2e année IFSIC -- TD Traitement d'images
- 24h -- cycle ingénieur 2e année IFSIC -- TP Traitement d'images (C++/Matlab)
[an error occurred while processing this directive]