New Position
Céline Teulière is now assistant professor at Université Blaise Pascal (Institut Pascal)
Background
I received my PhD degree from Université de Rennes 1 in December 2010. My PhD thesis was a collaboration between the Laboratoire d'Intégration des Systèmes et des Technologies (L.I.S.T) of C.E.A. (The French Atomic Agency) and the Lagadic team of IRISA.
I joined the Lagadic team in 2011 to continue my research as a postdoc.
Research areas
- Visual perception : visual tracking, localisation
- Robotics : visual servoing, navigation
3D servoing using dense depth maps
Principle
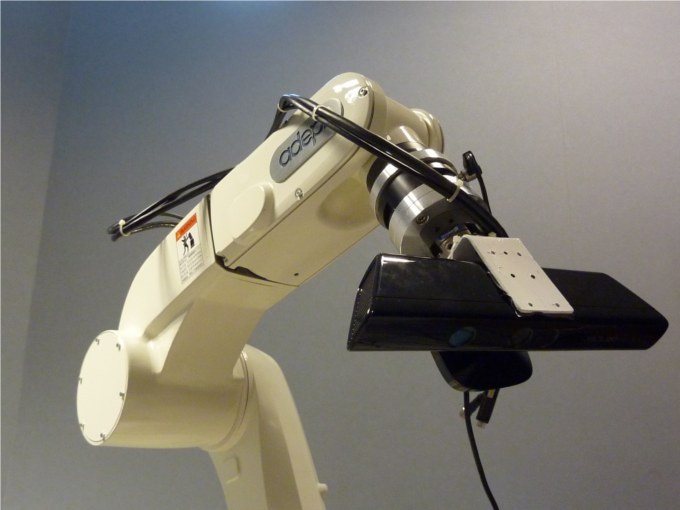
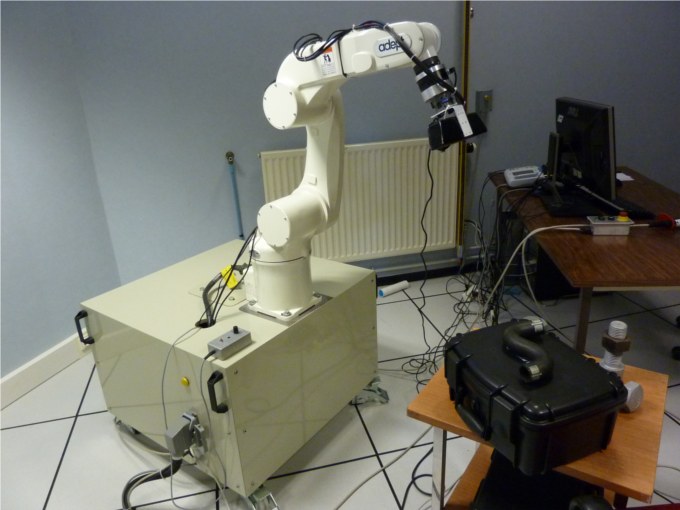
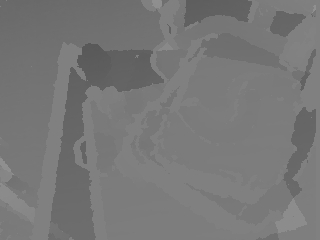
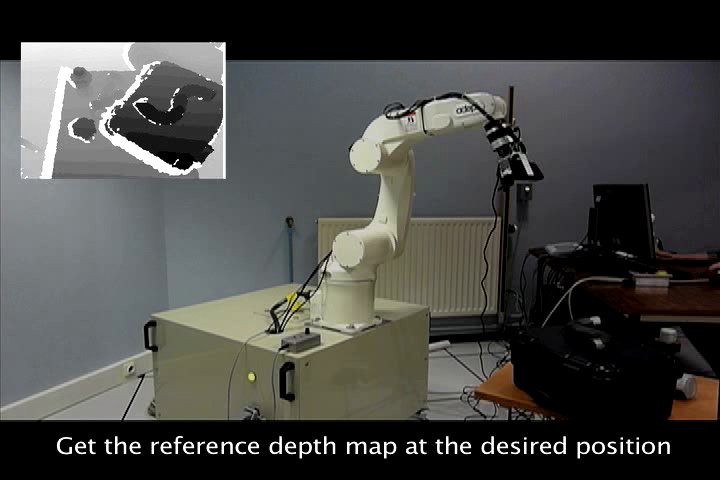
In this work, we propose to use dense depth maps to achieve 3D robotic tasks. With respect to position-based approaches, our method does not require the estimation of the 3D pose (direct), nor the extraction and matching of 3D features (dense) and only requires dense depth maps provided by 3D sensors.
|
|
|
|
|
Validation
Our approach has been validated in servoing experiments using the depth information from a Microsoft Kinect sensor. Positioning tasks are properly achieved despite the noisy measurements, even when partial occlusions or scene modifications occur.
|
3D model-based tracking for UAV indoor localization and navigation
Principle
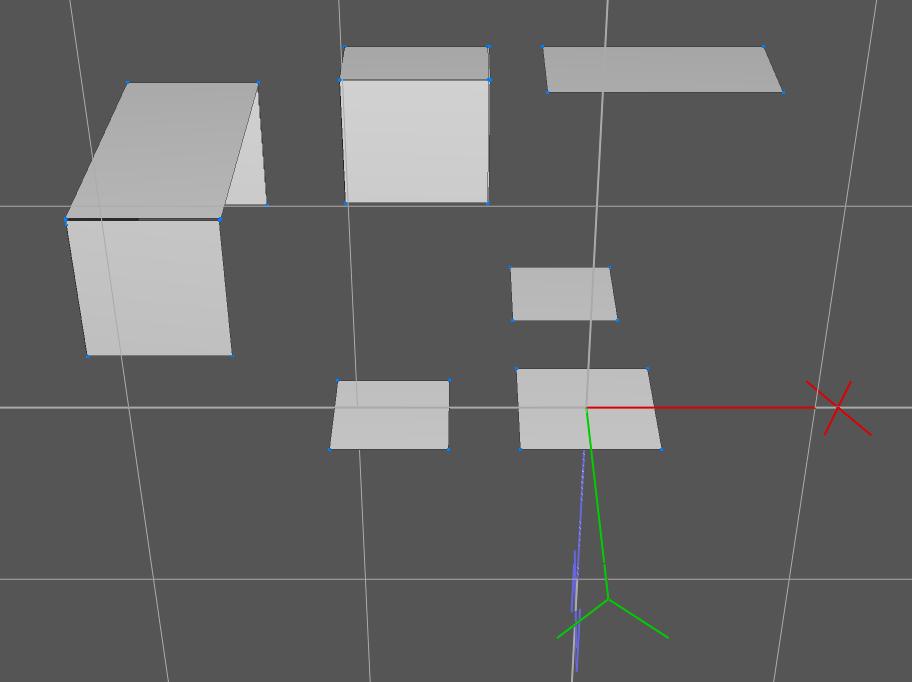
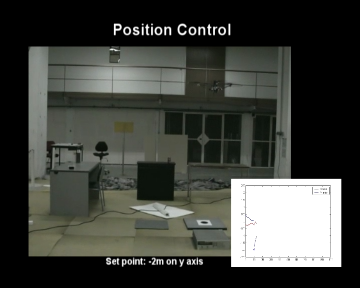
We propose a 3D model-based tracking suitable for indoor position control of an unmanned aerial vehicle (UAV). Given a 3D model of the edges of its environment, the UAV locates itself thanks to a robust multiple hypothesis tracker. The pose estimation is fused to inertial data to provide the translational velocity required for the control. A hierarchical control is used to achieve positioning tasks.

|
|
|
|
Validation
Way-point navigation has been performed on the quad-rotor UAV developed by CEA.

| 3D model-based tracking for UAV position control IEEE IROS'10  |

| Using multiple hypothesis in 3D model-based tracking IEEE ICRA'10 |
Chasing a moving target from a flying UAV
Principle
We propose a vision-based algorithm to autonomously track and chase a moving target with a small-size flying UAV. The challenging constraints associated with the UAV flight led us to consider a density-based representation of the object to track. The proposed approach to estimate the target's position, orientation and scale, is built on a robust color-based tracker using a multi-part representation. This object tracker can handle large displacements, occlusions and account for some image noise due to partial loss of wireless video link, thanks to the use of a particle filter. The information obtained from the visual tracker is then used to control the position and yaw angle of the UAV in order to chase the target. A hierarchical control scheme is designed to achieve the tracking task.

Validation
The overall approach was validated on sequences with noise and occlusion.
The tracking part has been published in:
IEEE ICRA'09
Publications
Complete list (with postscript or pdf files if available)
Teaching
- 2012: Computer Science (TP) , ISTIC, Rennes - Licence 1
- 2011: Statistics (TD et TP) , ESIR, Rennes - Engineering school, first year
- 2008: Image processing (TD et TP) , IFSIC, Rennes - Engineering school, fourth year
|
| Lagadic
| Map
| Team
| Publications
| Demonstrations
|
Irisa - Inria - Copyright 2009 © Lagadic Project |