The objective of this research work is the development of a new visual servoing method to guide a 2D ultrasound probe, held by a medical robot, directly from the 2D ultrasound image in
order to reach a desired soft tissue image.
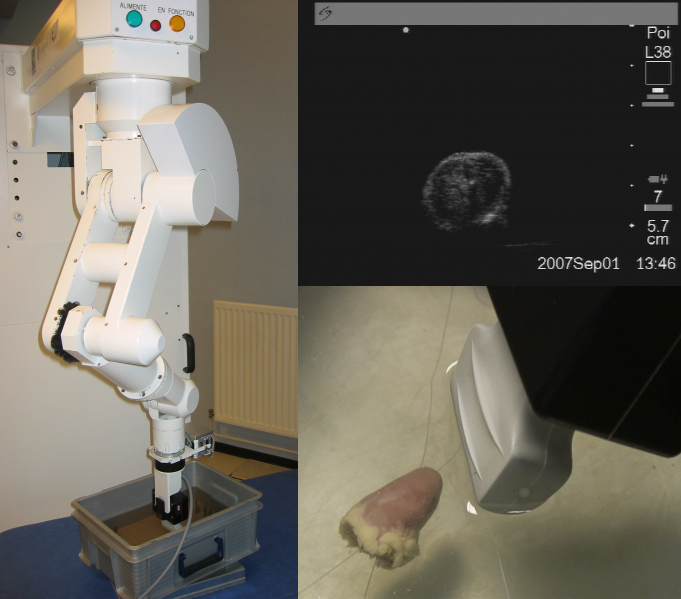
A manner a 2D ultrasound probe interacts with its environment differs totally from an optical system. Indeed, a 2D Ultrasound probe provides a cross-section image of the observed object. In other words, such a sensor provides full information only in its observation plane but none outside of it. In contrary, an optical system, like a camera for instance, provides a projection of the 3D world to a 2D image and, consequently, the existing visual servoing methods, most of them devoted for such a system, can not be used in the case of 2D ultrasound. Thus, new techniques have to be developed. R. Mebarki & al. developed a new visual servoing that automatically guide a 2D ultrasound probe from the images its provides. Opting for image moments seems a judicious direction. Indeed, Image moments are intuitive with geometrical interpretation, where their low order are directly related to the area and the gravity center of the observed section in the image. They have been widely used in pattern recognition. Moreover, these features do not necessitate a matching of the points in the image but only a global segmentation of the section in the image. They are also robust to perturbations, which is of great interest in ultrasound images, that are inherently very noisy.