
| Non-linear registration of MRI acquisition of different subjects |
Contact: Pierre Hellier , Christian Barillot,Etienne Memin, Patrick Perez
Purposes
MethodGeneral formulationResults
Robust estimators
Multiresolution and multigrid approachesExperiment on simulated data
Experiment on real data
Experiment on a database of 18 subjects
| Purposes |
The non-linear registration of brains from different subjects allows to build an anatomical atlas of the cortex. Some atlases (Ono, Talairach) already exist, but they appear to be inadequate, because they often lack legibility and capacity to evolve, and their interpretation is very difficult. The major problem in building an atlas is the important variability of the human brain. It has been clearly shown (by Ono in particular) that we cannot assume topological equivalence between two different brains. Considering the same sulcus of different subjects, one may find large differences of orientation, size, and even topology (one sulcus may be interrupted or absent for instance).
We designed a new method for medical image registration. The registration is formulated as a minimization problem involving robust estimators. We propose an efficient hierarchical optimization framework which is both multiresolution and multigrid in order to accelerate the algorithm and to improve the quality of the estimation. The adaptive partition, on wich the multigrid minimization is performed, allows to limit the estimation to the areas of interest, to accelerate the algorithm, and to refine the estimation in specified areas. The performances of this method are objectively evaluated on simulated data and its benefits are demonstrated on a large database of real acquisitions.
| Method |
Furthermore, at each level of resolution, we use a multigrid minimization based on successive partitions of the initial volume (see animation). At each grid level, corresponding to a partition of cubes, we estimate a 12-dimension parametric increment field for each cube of the partition. The energy is consequently smoother, and has fewer local minima. This results is a rough estimate of the desired solution, which is then used to initialize the next level. This optimization strategy improves the quality and the convergence rate as compared to standard iterative solvers (such as Gauss-Seidel). When we change from grid level, each cube is adaptively divided.
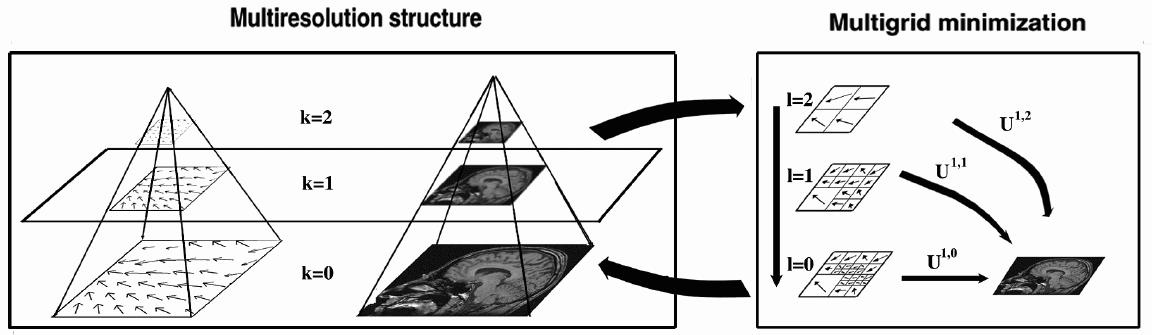
Example of multiresolution/multigrid minimization. For each resolution
level (on the left), a multigrid strategy (on the right) is performed.
For clarity reasons, the figure is a 2D illustration of a 3D algorithm
with volumetric data.
| Results |
As we have the binary classification of the phantom, we can asses the quality of the registration based on the overlap of two volumes: the first volume is the initial classification, i.e. a gold standard (grey matter/white matter), the second volume is the deformed classification, registered with the estimated deformation field. We then measure out overlapping ratios like the sensibility, the specificity, and the total performance. Results are presented in following table. We also compute the mean square error (MSE) which is an indicator of the quality of the registration. Despite the use of binary classes defined on a discrete grid, the resulting measures that we obtain are very satisfactory. In particular, the algorithm performs well even under the severist imaging conditions (9%noise and 40% inhomogeneity).
Numerical measures of the quality of the registration on simulated
data. Specificity, sensibility and total performance measures are given
for 3 levels of noise and 2 registration methods. We manage to recover
up to 93% of the deformation even in presence of important noise (9%) and
image intensity inhomogeneity (40%).
The difference volumes must be interpreted carefully, since we get the superposition of two errors. The first is the registration error that the method could not account for. The second error is due to the variability of the acquisition process making the two original histograms different. The computation takes about 1:30 hour on an Ultra Sparc 30 (300 Mhz). The volumes are 256*256*200. We use 3 levels of resolution because the displacement amplitude may reach 30 voxels.
source volume reconstructed volume target volume
AVI (629Ko) or MPEG
(1308 Ko) AVI (619Ko) or MPEG
(2537 Ko) AVI (943Ko) or MPEG
(2615 Ko)
initial difference final difference adaptive partition
Furthermore, for each grid and resolution level, we compute the reconstructed volume at the initial volume size. The next animation (avi) shows how the registration is refined in a hierarchical way. Large deformations are estimated at coarsest resolution levels (blurred reconstructed volumes).
hierachical estimation of the deformation field
AVI (124 Ko) or MPEG
(627 Ko)

averaging after global affine registration

averaging after robust multigrid registration

reference subject
| References |
| Webmaster : vista_webmaster@irisa.fr
Last modified: Wed Feb 2 10:24:54 MET 2000 |