Depuis octobre 2008, je travaille sur une thèse dans le domaine de l'asservissement visuel échographique au sein de l'équipe Lagadic de l'IRISA. Cette thèse est réalisée sous la direction d'Alexandre Krupa et François Chaumette.
Thématiques de recherche
Asservissement visuel ;
Robotique médicale ;
Imagerie médicale ;
Asservissement visuel échographique
De plus en plus de systèmes robotiques guidés par l'images sont développés dans le but d'assister des procédures de chirurgie mini invasives ou d'insertion d'aiguille. Parmi les modalités d'imageries médicales disponibles pour réaliser la commande basée images de tels systèmes, l'imagerie échographique se distingue par son faible coût et encombrement ainsi que son caractère temps-réel. De plus, contrairement aux modalités d'imagerie IRM ou scanner, l'utilisation répétée des ondes ultrasons (US) n'a pas d'effet dommageable pour le patient ou le praticien.
Les approches par asservissement visuel permettent de contrôler de manière directe l'effecteur d'un bras robotique à partir d'informations extraites de l'image d'un capteur visuel. Contrairement aux approches traditionnelles qui utilisent l'information contenue dans la vue d'une caméra, nous proposons ici de nous intéresser à l'information visuelle présente dans l'image d'une sonde échographique (US). La géométrie de ces deux capteurs étant radicalement différente, la modélisation de la variation de l'information image en fonction du mouvement de l'effecteur robotique doit être repensée. En particulier, dans la mesure où une sonde échographique ne fournit de l'information que dans un plan de coupe, le contrôle des mouvements hors plan de l'effecteur constitue la principale difficulté de l'asservissement visuel échographique et peu de solutions sont actuellement proposées pour contrôler tous les degrés de liberté (ddl) de la sonde.
Approche géométrique multi-plans
Principe
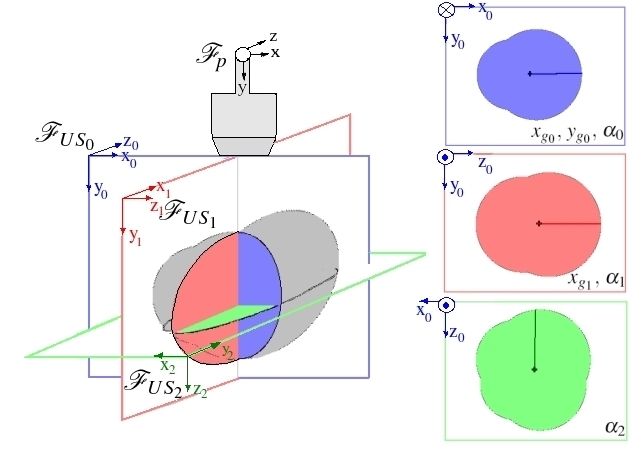
La sonde considérée fournit trois images selon trois plans orthogonaux, d'où sont extraites six données géométriques choisies pour contrôler efficacement chaque ddl. Chacune de ces informations géométriques, calculée à partir des moments 2D de la section de l'objet segmenté dans l'image US, est particulièrement représentative d'un ddl donné.
Application au recalage multimodal
La méthode proposée a été appliquée pour réaliser une tâche de recalage multi-modal entre un volume pré-opératoire TDM et des coupes intra-opératoires US. Après avoir exprimé le problème de recalage comme une tâche d'asservissement visuel, la modélisation de l'interaction entre les données géométriques choisies et les déplacements d'une sonde virtuelle interagissant avec le volume TDM permet en effet de minimiser l'erreur entre les images pré-opératoires et intra-opératoires.
Afin de s'affranchir des limitations dues à l'extraction d'informations géométriques (échec de la segmentation, changement de topologie de l'organe), une nouvelle approche basée sur l'intensité des pixels est envisagée. Les informations visuelles choisies correspondent directement à la valeur d'intensité d'un ensemble de pixels de l'image. La variation de ces informations est liée au mouvement de la sonde par l'intermédiaire du gradient 3D de l'image et de la matrice d'interaction associée au point 3D.
Suivi d'une coupe abdominale avec une sonde 2D
La matrice d'interaction impliquée dans la loi de commande est estimée à la position désirée de la sonde 2D. Une application de suivi est alors considérée où la sonde suit de manière automatique le mouvement appliqué au fantôme afin de conserver en permanence la même coupe abdominale.
L'objectif est de stabiliser une vue anatomique désirée en compensant les mouvements physiologiques du patient pour assister le chirurgien lors d'une procédure de diagnostique ou d'insertion d'aiguille par exemple. Une approche prédictive est alors considérée pour tenir compte de la périodicité des mouvements physiologiques.
Positionnement avec sonde échographique 2D et bi-plans
Une méthode d'estimation en ligne de la matrice d'interaction impliquée dans la loi de commande est proposée. Elle permet alors de calculer la matrice d'interaction courante associée à l'information d'intensité et d'envisager des tâches de positionnement avec une sonde 2D. L'approche basée intensité est également étendue pour considérer le cas d'une sonde bi-plans où l'information visuelle est extraite de deux plans orthogonaux.