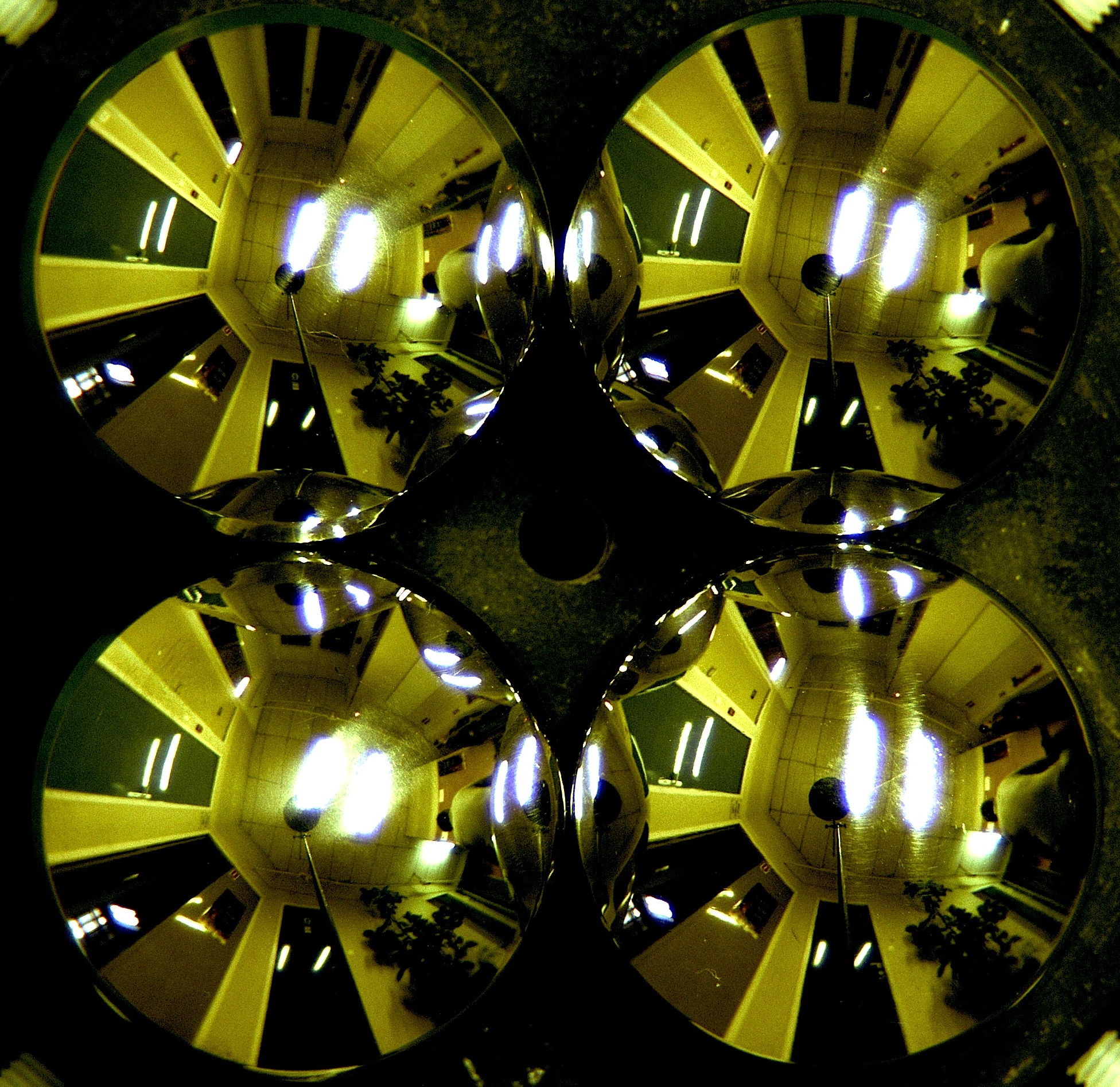
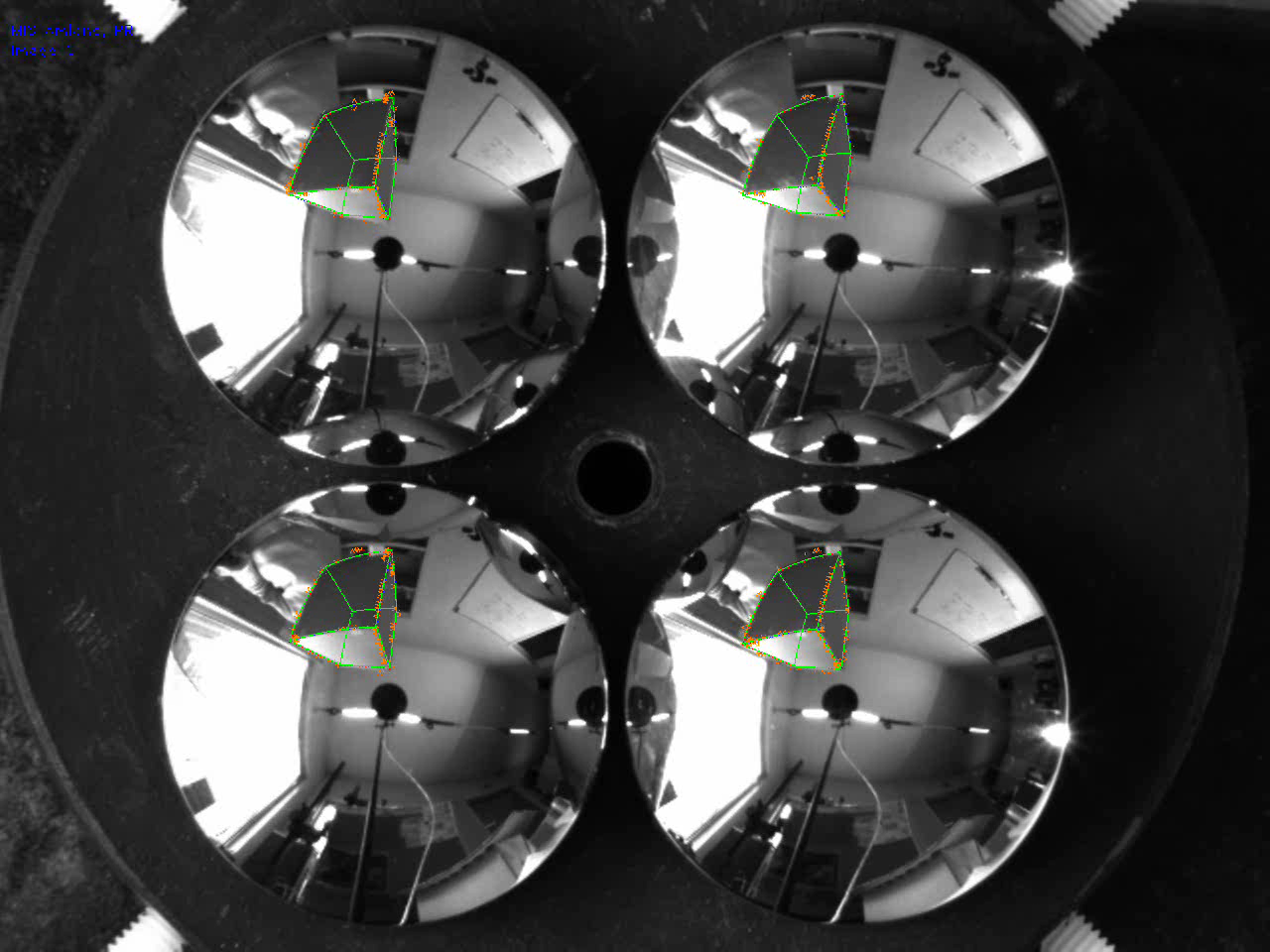
This page presents real-time, robust and efficient 3D model-based tracking algorithm considered in the context if stereo catadioptric images. A virtual visual servoing approach is used for 3D tracking. This work is a result of a collaboration with the MIS laboratory (Université de Picardie Jules Verne) and more precisely with Guillaume Caron and El Mustapha Mouaddib.