[an error occurred while processing this directive]
Muriel Pressigout
| Coordonnées
| Cursus
| Recherches
| Enseignement
| Publications
|
Coordonnées
Email : Muriel.Pressigout@irisa.fr
Adresse : IRISA / INRIA Rennes
Campus Universitaire de Beaulieu
35042 Rennes cedex - France
Tél : +33 2 99 84 73 05
Fax : +33 2 99 84 71 71
Secrétaire : +33 2 99 84 22 52
(Céline Ammoniaux)
Curriculum vitae (en français) : Cliquez ici (fichier pdf)
|

|
Cursus
J'ai obtenu mon diplôme de DEA en informatique (filičre image et intelligence artificielle) en juin 2003, en parallčle avec celui d'ingénieur en informatique de l'INSA de Rennes (Institut National de Sciences Appliquées).
En décembre 2006, j'ai soutenu et obtenu mon doctorat en Informatique sur le sujet " Approches hybrides de suivi temps-réel d'objet complexes dans des séquences vidéo". Ce travail de recherche s'est déroulé au sein du projet VISTA puis LAGADIC, avec Éric Marchand comme directeur de thčse.
Je suis pour l'année 2006-2007 ATER (Attachée Territoriale ŕ l'Enseignement et ŕ la Recherche) ŕ l'Université de Rennes 1, continuant mes travaux de recherche dans le projet LAGADIC.
Thématiques de recherche
Mon travail s'articule autour du suivi et des techniques d'asservissement visuel qui consistent ŕ contrôler les mouvements d'un systčme robotique ŕ l'aide d'informations
visuelles acquises par un systčme de vision et intégrées au sein de lois de
commande en boucle fermée. Ces techniques sont utilisées dans le cadre de la vision par ordinateur pour estimer la position d'un objet dans l'image ou bien celle de la caméra par rapport ŕ l'objet.
Approches hybrides pour le suivi en temps réel d'objets complexes dans une séquence d'images.
Le suivi d'objets ou de formes est un problčme largement ouvert en
vision par ordinateur. L'objectif de cette thčse était de proposer
et mettre en oeuvre des algorithmes de suivi reposant ŕ la fois sur des
informations de type contour (zone de fort gradient) et sur les motifs de l'objet.
En effet, ces deux types d'information sont des inconvénients et des avantages complémentaires. L'idée est donc d'exploiter ces deux primitives visuelles dans une męme fonction objectif. L'optimisation par une approche non-linéaire de cette fonction nous a permis d'obtenir de bons résultats, tout d'abord dans le cadre de suivi d'objet sans connaissance de la scčne puis dans le cadre du calcul de pose utilisant un modčle 3D de l'objet.
Un intéręt particulier a été porté ŕ la robustesse de l'algorithme vis ŕ vis des occultations potentielles et des changements d'illumination.
Les expérimentations permettant de valider les travaux théoriques effectués
sont testées sur des séquences d'images comprenant aussi bien des objets
manufacturés que des environnements urbains ainsi que
sur des séquences acquises en ``live'' sur les cellules de vision robotique de l'IRISA.
Les algorithmes développés sont implémentés en C ou C++ sous Linux. cf. publi
Quelques vidéos illustrant les résultats obtenus:
Je travaille actuellement sur une approche de suivi hybride 3D ne nécessitant pas de modčle de texture mais permettant d'avoir des résultats aussi robustes.
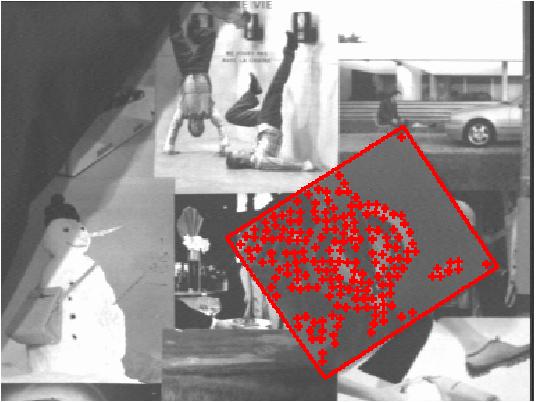
Réalité augmentée avec un minimum de connaissance 3D en utilisant les techniques d'asservissement visuel virtuel
Ce sujet est motivé par le constat suivant: le calcul de pose, qui
est un problčme classique en vision par ordinateur, impose de connaître
trop d'informations tridimensionnelles sur la scčne. Une autre approche
consiste ŕ n'utiliser que les informations visuelles extraites des
images pour estimer le mouvement de la caméra sur une séquence vidéo.
Cette approche a été réalisée en se basant sur la minimisation
non-linéaire par asservissement visuel virtuel. Pour un déplacement
avec translation, la contrainte géométrique utilisée pour l'élaboration
de la loi de commande se base sur la contrainte épipolaire. Pour
estimer une rotation pure, la contrainte ŕ minimiser se base cette fois
sur l'estimation d'une homographie liant les points de deux images
successives. L'approche a été appliquée sur des séquences filmées sur
le campus et validée dans une application de réalité augmentée
efficace, intuitive et peu contraignante. cf. publi ou page de démo
Asservissement visuel robuste:
J'ai effectué en 2002 un premier stage au sein du projet VISTA ŕ l'IRISA, dans la partie robotique devenue l'équipe LAGADIC. L'objectif est de développer, mettre en oeuvre et valider sur le robot de l'équipe la loi de commande robuste développée par Andrew Comport
dans le contexte de l'asservissement visuel virtuel afin de réaliser
des positionnements robustes par asservissement visuel. En effet, l'un
des défauts majeurs de l'asservissement visuel est la sensibilité et la
faible robustesse aux données aberrantes. La loi de commande permet
d'assurer conjointement la tâche d'asservissement visuel et de prendre
en compte ces données erronées. Les erreurs peuvent provenir aussi bien
de l'extraction des indices visuels qued'une erreur de suivi ou
d'appareillement. La méthode se base sur l'utilisation des techniques
d'estimation statistique robuste et en particulier, les M-estimateurs. 
Enseigement
J'ai effectué successivement des vacations, un monitorat puis des enseignements dans le cadre de mon poste actuel d'ATER ŕ l'Université de Rennes 1 et ŕ l'INSA de Rennes. Voici la liste des enseignements dispensés pour donner une idée des matičres/formations couvertes.
ATER temps complet ŕ l'IFSIC, Université de Rennes 1
- Introduction aux Réseaux Informatiques, École d'ingénieur DIIC 2
- Systčmes d'exploitation, École d'ingénieur DIIC 2
- Test et Qualité Logiciel, École d'ingénieur DIIC 3
- Logique, L3-INFO
- Méthodes Formelles pour le Génie Logiciel, M1-INFO
- Architecture Matérielle, M2-P-CCI
- Initiation ŕ l'Algorithmique et ŕ la Programmation, M2-P-CCI
- Informatique Scientifique, L1L2-PCGI
Monitorat ŕ l'IFSIC, Université de Rennes 1
- Traitement d'Informations Biologiques, DEUG Sciences de la Vie
- Introduction ŕ l'Informatique Scientique 1, DEUG Sciences de la Matičre
- Introduction ŕ l'Informatique Scientique 2, DEUG Sciences de la Matičre
- Algorithmique et Programmation : approche Impérative, DEUG MASS puis L1L2-MIPE
- Programmation Impérative, L1L2-PCGI
Vacations ŕ l'INSA de Rennes
- Initiation ŕ l'algorithmique Java, cycle préparatoire
- Programmation par contraintes, cycle ingénieur
Publications
Liste complčte (et fichiers postcript ou pdf si disponibles)
Thčses
M. Pressigout. Approches hybrides pour le suivi temps-réel d'objets complexes dans des séquences vidéo. Thčse de l'Université de Rennes 1, mention informatique, Décembre 2006. 
Suivi hybride
M. Pressigout, E. Marchand. Real-time 3D Model-Based Tracking: Combining Edge and Texture Information. In IEEE Int. Conf on Robotics and Automation, ICRA'06, Orlando, Florida, Mai 2006.
M. Pressigout, E. Marchand. A model free hybrid algorithm for real time tracking. In IEEE Int. Conf. on Image Processing, ICIP'05, Volume 3, Pages 97-100, Ge`ne, Italie, Septembre 2005.
Réalité augmentée
A.I. Comport, E. Marchand, M. Pressigout, F. Chaumette. Real-time markerless tracking for augmented reality: the virtual visual servoing framework. IEEE Trans. on Visualization and Computer Graphics, 12(4):615-628, Juillet 2006.
M. Pressigout, E. Marchand. Model-free augmented reality by virtual visual servoing. In IAPR Int. Conf. on Pattern Recognition, ICPR'04, Cambridge, Royaume-Uni, Aoűt 2004.
Asservissement visuel robuste
A. Comport, M. Pressigout, E. Marchand, F. Chaumette. A Visual Servoing Control Law that is Robust to Image Outliers. In IEEE Int. Conf. on Intelligent Robots and Systems, IROS'03, Volume 1, Pages 492-497, Las Vegas, Nevada, Octobre 2003.
[an error occurred while processing this directive]