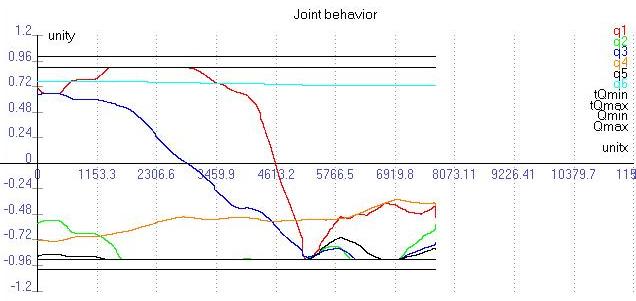
We proposed a new redundancy-based solutions to avoid robot joint limits of a manipulator. We use a control scheme based on the task function approach. We first recall the classical gradient projection approach and we then present a far more efficient method that relies on the iterative computation of motion that does not affect the task achievement and ensures the avoidance problem. We apply this new method in a visual servoing application.
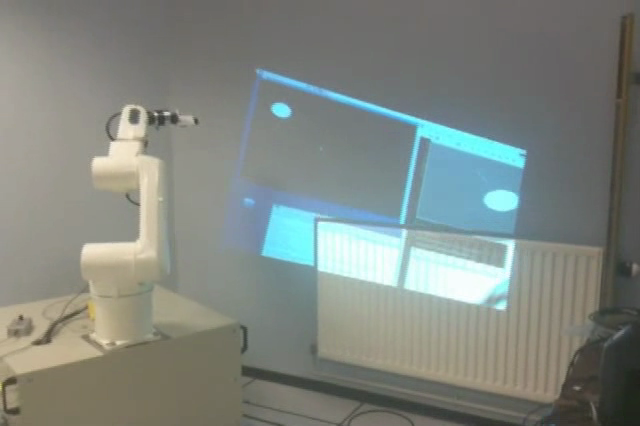
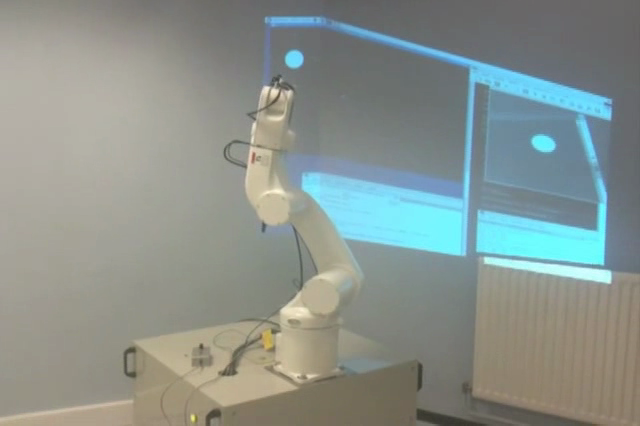
These results have been obtained on an Adept Viper robot.

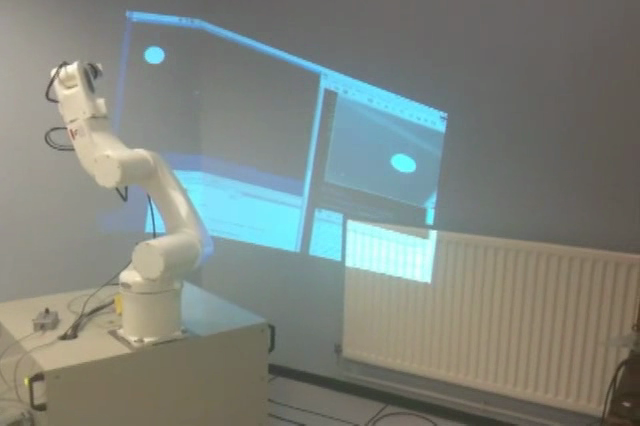
 Full quicktime video (divx Movie)
Full quicktime video (divx Movie)

|
| Lagadic
| Map
| Team
| Publications
| Demonstrations
|
Irisa - Inria - Copyright 2009 © Lagadic Project |